Part 01
Ch. 01. Socket Network Programming
Ch. 02. File Descriptor, open(), close(), write(), read()
Ch. 05. Network Byte Order, Big Endian, Little Endian
Part 2
Ch.10.
Ch.11.
Ch.12.
Ch.13.
Ch.14.
Ch.15.
Ch.16.
Ch.17.
Ch.18.

getsockopt & setsockopt
#include <sys/socket.h>
int getsockopt(int sock, int level, int optname, void *optval, socklen_t *optlen);
// 성공시 0 , 실패시 -1 반환
// sock 옵션확인을 위한 소켓의 파일 디스크립터 전달
// level 확인할 옵션의 프로토콜 레벨 전달
// optname 확인할 옵션의 이름 전달
// optval 확인결과의 저장을 위한 버퍼의 주소 값 전달
// optlen 네 번째 매개변수 optval로 전달된 주소 값의 버퍼크기를 담고 있는 변수의 주소 값
// 함수호출이 완료되면 네 번째 인자를 통해 반환된 옵션정보의 크기가 바이트 단위로 저장
#include <sys/socket.h>
int setsockopt(int sock, int level, int optname, const void *optval, socklen_t optlen);
// 성공시 0 , 실패시 -1 반환
// sock 옵션확인을 위한 소켓의 파일 디스크립터 전달
// level 확인할 옵션의 프로토콜 레벨 전달
// optname 확인할 옵션의 이름 전달
// optval 확인결과의 저장을 위한 버퍼의 주소 값 전달
// optlen 네 번째 매개변수 optval로 전달된 옵션정보의 바이트 단위 크기 전달getsockopt 예제
"소켓의 타입은 소켓 생성시 한번 결정되면 변경이 불가능하다."
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/socket.h>
void error_handling(char *message);
int main(int argc, char *argv[])
{
int tcp_sock, udp_sock;
int sock_type;
socklen_t optlen;
int state;
optlen=sizeof(sock_type);
tcp_sock=socket(PF_INET, SOCK_STREAM, 0);
udp_sock=socket(PF_INET, SOCK_DGRAM, 0);
printf("SOCK_STREAM: %d \n", SOCK_STREAM);
printf("SOCK_DGRAM: %d \n", SOCK_DGRAM);
state=getsockopt(tcp_sock, SOL_SOCKET, SO_TYPE, (void*)&sock_type, &optlen);
if(state)
error_handling("getsockopt() error!");
printf("Socket type one: %d \n", sock_type);
state=getsockopt(udp_sock, SOL_SOCKET, SO_TYPE, (void*)&sock_type, &optlen);
if(state)
error_handling("getsockopt() error!");
printf("Socket type two: %d \n", sock_type);
return 0;
}
void error_handling(char *message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}SO_SNDBUF & SO_RCVBUF
소켓이 생성되면 입력 버퍼와 출력 버퍼가 생성된다.
SO_SNDBUF, SO_RCVBUF를 통해 버퍼의 크기 참조, 변경 가능하다.
버퍼 사이즈 출력
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/socket.h>
void error_handling(char *message);
int main(int argc, char *argv[])
{
int sock;
int snd_buf, rcv_buf, state;
socklen_t len;
sock=socket(PF_INET, SOCK_STREAM, 0);
len=sizeof(snd_buf);
state=getsockopt(sock, SOL_SOCKET, SO_SNDBUF, (void*)&snd_buf, &len);
if(state)
error_handling("getsockopt() error");
len=sizeof(rcv_buf);
state=getsockopt(sock, SOL_SOCKET, SO_RCVBUF, (void*)&rcv_buf, &len);
if(state)
error_handling("getsockopt() error");
printf("Input buffer size: %d \n", rcv_buf);
printf("Outupt buffer size: %d \n", snd_buf);
return 0;
}
void error_handling(char *message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}버퍼 사이즈 변경
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/socket.h>
void error_handling(char *message);
int main(int argc, char *argv[])
{
int sock;
int snd_buf=1024*3, rcv_buf=1024*3;
int state;
socklen_t len;
sock=socket(PF_INET, SOCK_STREAM, 0);
state=setsockopt(sock, SOL_SOCKET, SO_RCVBUF, (void*)&rcv_buf, sizeof(rcv_buf));
if(state)
error_handling("setsockopt() error!");
state=setsockopt(sock, SOL_SOCKET, SO_SNDBUF, (void*)&snd_buf, sizeof(snd_buf));
if(state)
error_handling("setsockopt() error!");
len=sizeof(snd_buf);
state=getsockopt(sock, SOL_SOCKET, SO_SNDBUF, (void*)&snd_buf, &len);
if(state)
error_handling("getsockopt() error!");
len=sizeof(rcv_buf);
state=getsockopt(sock, SOL_SOCKET, SO_RCVBUF, (void*)&rcv_buf, &len);
if(state)
error_handling("getsockopt() error!");
printf("Input buffer size: %d \n", rcv_buf);
printf("Output buffer size: %d \n", snd_buf);
return 0;
}
void error_handling(char *message)
{
fputs(message, stderr);
fputc('\n', stderr);
exit(1);
}
/*
root@com:/home/swyoon/tcpip# gcc get_buf.c -o getbuf
root@com:/home/swyoon/tcpip# gcc set_buf.c -o setbuf
root@com:/home/swyoon/tcpip# ./setbuf
Input buffer size: 2000
Output buffer size: 2048
*/
Time-wait
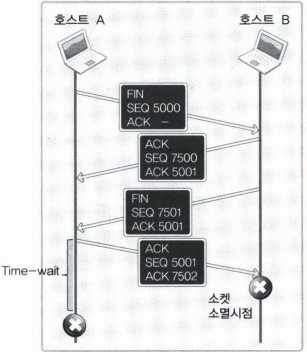
호스트 A(Server)의 연결 해체는 Four-way handshaking 이후에 소켓이 바로 소멸되지 않고 Time-wait 상태라는 것을 일정시간 거친다.
해당 소켓의 PORT번호가 사용중인 상태이기 때문dp bind 함수의 호출과정에서 오류가 발생한다.
클라이언트 소켓의 PORT번호는 서버와 달리 프로그램이 실행될 때마다 유동적으로 할당되기 때문에 Time-wait 상태에 대해 고려하지 않아도 된다 .

서버가 시스템 문제로 갑작스럽게 종료된 경우, 재빨리 서버를 재가동시켜 서비스를 이어가야 하는데 Time-wait 때문에 기다릴 수밖에 없다면 이는 문제가 될 수 있다 .
SO_REUSEADDR의 디폴트 값은 O(FALSE) 인데 , 이는 Time-wait 상태에 있는 소켓의 PORT변호는 할당이 불가능함을 의미한다.
변경 >>
optlen=sizeof(option);
option=TRUE ;
setsockopt(serv_sock, SOL_SOCKET, SO_REUSEADDR, (void*)&option, optlen)Nagle
"앞서 전송한 데이터의 ACK 메시지를 받아야만, 다음 데이터를 전송하는 알고리즘"
TPC는 기본적으로 Nagle 알고리즘을 적용
ACK가 수신될때까지 최대한 버퍼링 후 전송
Nagle 알고리즘의 중단

Nagle 알고리즘을 고집할 필요는 없이 필요하다면 Nagle 알고리즘을 중단시켜야 한다.
TCP _NODELA을 1(TRUE)로 변경 >>
int opt_val=1;
setsockopt(sock, IPPROTO_TCP, TCP_NODELAY,(void*)&opt_val, sizeof(opt_val));